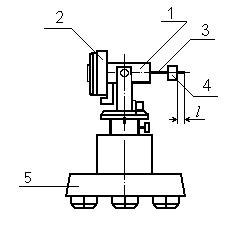
В нашей работе телом гироскопа служит электромотор 1 с маховиком 2, укрепленный на одном конце массивного стержня 3. На другом конце стержня имеется противовес 4, предназначенный для создания свободной уравновешенной системы относительно горизонтальной оси и получения момента внешних сил, вызывающих прецессию гироскопа. Прецессия гироскопа вызывается смещением противовеса вдоль стержня. Таким образом, момент сил, вызывающих прецессию, равен разности моментов, создаваемых противовесом в неуравновешенном и уравновешенном состояниях, , где m – масса противовеса вместе с контргайкой, – плечо уравновешенного, а – плечо неуравновешенного гироскопа. Скорость вращения гироскопа и скорость прецессии определяются блоком управления.